
Mon Canadarm3

Durant cette activité, vous concevrez et construirez votre propre Canadarm3. Vous verrez en même temps les façons dont les bras peuvent plier à divers endroits (coude, épaule, poignet, doigts) et ce que leur fonction et leurs différentes capacités nous permettent de faire.

Version textuelle de l'infographie Processus de conception en ingénierie
Processus de conception en ingénierie
- Problème ou défi
- Définis le problème
- Identifie les contraintes et défis de conception possibles
- Remue-méninges pour penser à plusieurs solutions au problème
- Sélectionne la solution la plus prometteuse
- Prototype la solution
- Teste et évalue ton prototype
- Revois ton prototype afin de l'améliorer
- Communique ta solution
Infographie intitulée « Processus de conception en ingénierie ». (Source : ASC.)
Définir
Avez-vous déjà pensé à la façon dont nos bras bougent et combien ils nous aident à faire des choses importantes comme manger, nous brosser les dents, jouer à des jeux, pratiquer des sports et faire tant de choses étonnantes? Quelle est la meilleure chose que vos bras et vos mains vous permettent de faire?
Imaginez maintenant si on ne pouvait pas plier les bras, ni faire bouger les mains de haut en bas et de gauche à droite, ni avoir de mains avec des doigts articulés. En quoi la vie serait-elle différente? Quelles parties du corps permettent à nos bras et à nos mains d'être si utiles?
Les robots sont très différents des humains, et ils peuvent nous être très utiles si on les conçoit bien. On a des muscles qui nous aident à bouger les bras, les robots ont des moteurs. Les humains ont un système nerveux qui indique aux muscles quand bouger, les robots ont des fils. On a un cerveau qui nous aide à contrôler tout le corps et à décider pourquoi et comment on doit bouger. Les robots ont un ordinateur et un logiciel qui leur dit quoi faire et comment le faire.
En 1981, il y a plus de 40 ans, des ingénieurs canadiens ont fabriqué un bras robotisé très important qu'ils ont appelé « Canadarm ». Ce bras robotisé a été le premier en son genre à aller dans l'espace. Il faisait partie du programme de la navette spatiale, qui n'existe plus aujourd'hui. Depuis ce temps, les ingénieurs canadiens ont pu apporter de nombreuses améliorations à ce célèbre bras robotisé.
En examinant le Canadarm, on constate qu'il a la forme d'un bras humain et qu'il peut se plier au niveau du coude. Faites bouger votre bras un peu dans tous les sens. Quels mouvements pouvez-vous faire? Lesquels sont plus difficiles? Lesquels sont limités et lesquels sont impossibles?
Y a-t-il des animaux qui bougent différemment des humains? Quelle est l'amplitude de leurs mouvements, et ont-ils des limitations différentes de celles des humains? Pensez aussi aux capacités des autres animaux et de leurs membres ainsi qu'à la fonction et à l'utilité de ces membres (p. ex. comparez un être humain, un chien et un tyrannosaure).
Saviez-vous que le Canada est un expert en robotique spatiale? Notre pays fournira le Canadarm3 à la station Gateway. Il a aussi conçu le Canadarm2 pour la Station spatiale internationale (SSI) et le premier Canadarm pour l'ancien programme de la navette spatiale. Voyez une comparaison des trois bras robotisés.

Le Canadarm2 (à droite, en forme de « V ») et son ami robot Dextre (en haut à gauche) à la SSI. (Source : NASA.)
Le système robotisé Canadarm3 qui sera installé à la station Gateway aura trois parties : un grand bras, un petit bras agile et une boite à outils. Chaque partie servira à quelque chose de différent, et ensemble, elles joueront plusieurs rôles, comme un vrai bras humain – bras, coude, avant-bras, poignet et main. Les bras robotisés accompliront des tâches très importantes à la station Gateway, comme déplacer des objets et faire des réparations.
Avec des matériaux simples comme du carton et de la ficelle, comment pouvez-vous concevoir un bras robotisé capable de bouger d'au moins une façon?
Identifier
Que devriez-vous garder en tête au moment de concevoir et construire votre Canadarm3?
Matériel suggéré
- Crayons à mine, crayons de couleur ou marqueurs.
- Carton, papier de construction ou boite de céréales vide.
- Bâtonnets de bois, pailles, brindilles ou branches.
- Attaches (élastiques, pince-feuilles, attaches parisiennes, cure-pipes, ficelle, ruban adhésif, colle ou colle maison).
- Ciseaux ou couteau utilitaire.
- Pistolet à colle chaude (facultatif).
- Papier quadrillé ou papier ordinaire.
- Tous les matériaux de récupération que vous avez sous la main (p. ex. bouteilles en plastique, boites d'œufs, pailles ou papier enroulé en forme de tube, bâtonnets de bois, brindilles, pierres).
- Peinture de diverses couleurs, papier de couleur, marqueurs, papier d'aluminium ou tout autre matériel disponible pour donner fière allure à votre bras!
- Blocs Lego, blocs K'NEX, blocs KEVA (facultatif).

Version textuelle de l'infographie de quelques techniques de découpage et pliage de carton
Quelques techniques de découpage et pliage de carton
- Collerette
- Renfort en L
- Languettes
- Fente + fente
- Fente + languette
- Ficelle
Quelques techniques de découpage et de pliage de carton. (Source : ASC.)
Faire un remue-méninges
Comment construire un bras robotisé capable de bouger et de se plier à au moins un endroit? Quels matériaux peuvent être utilisés pour créer des mouvements? Combien de pièces bougeront dans votre bras? De quelles pièces aurez-vous besoin pour votre bras et comment les ferez-vous bouger?
Sélectionner
Après avoir fait un remue-méninges avec vos amis, votre famille ou votre professeur, choisissez une idée qui vous plait et essayez de dessiner votre modèle avant de tenter de le réaliser. Assurez-vous d'étiqueter les différentes pièces de votre modèle.
Faire un prototype
- Concevez la première pièce droite de votre bras en utilisant les matériaux à votre disposition.
- Concevez la deuxième pièce droite de votre bras en utilisant les matériaux à votre disposition.
- Décidez ce que sera le point de pivot et les matériaux à utiliser pour le rendre mobile. Conseil : attention de ne pas coller cette partie et de ne pas trop la serrer, car elle doit pouvoir bouger.
- En utilisant la méthode de votre choix et les matériaux à votre disposition, reliez une extrémité de la première partie de votre bras à une extrémité de la deuxième partie.
- Qu'allez-vous utiliser pour faire bouger le bras? Allez-vous tirer sur une ficelle pour le déplacer dans une direction, et sur une autre ficelle pour le ramener dans l'autre direction? Ou bien utiliserez-vous des élastiques pour le replacer après le mouvement? À vous de choisir, soyez créatifs!
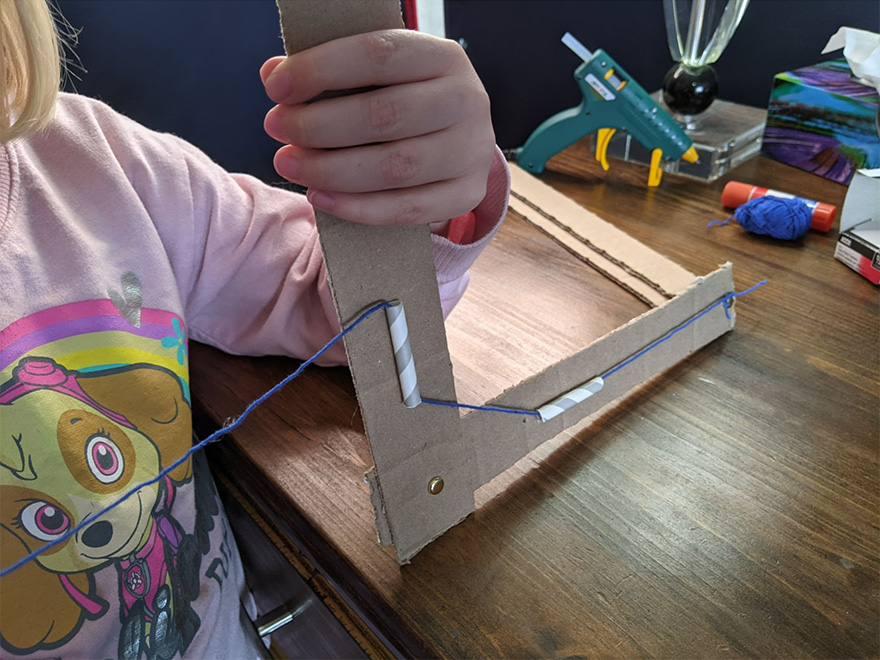
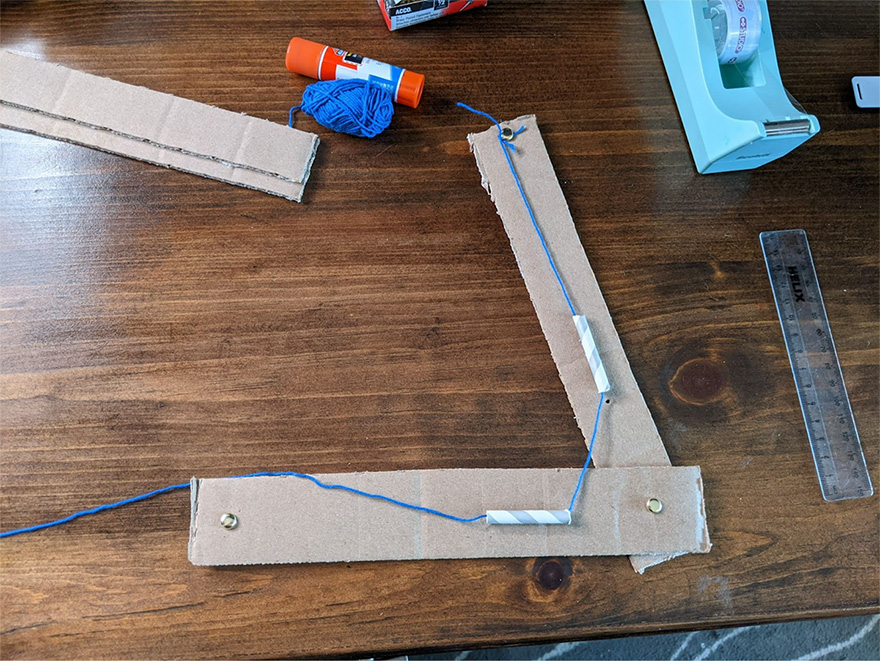
Exemples d'un bras conçu à l'aide de carton, de ficelle, de pailles et d'attaches – et de beaucoup d'imagination! (Source : ASC.)
Tester
- Votre bras a-t-il bougé comme vous le souhaitiez? Sinon, que s'est-il passé? Faut-il le modifier?
- Quelle partie de votre bras robotisé bouge?
Revoir
- Comment pourriez-vous le construire avec moins de matériaux?
- Pourriez-vous ajouter des pièces pour qu'il bouge mieux?
- Comment pourriez-vous ajouter des pièces pour faire bouger votre bras dans des directions différentes?
- Y a-t-il des choses que vous feriez différemment si vous aviez plus de temps?
Communiquer
- Quelles sont les principales caractéristiques de votre bras robotisé? Trouvez-vous qu'un des aspects est tout particulièrement intéressant?
- Montrez-nous votre projet. Demandez à un adulte de publier une photo dans les médias sociaux et de mentionner l'ASC. On ne sait jamais, un véritable astronaute pourrait voir votre création!
Approfondir
- Pouvez-vous ajouter des pièces mobiles à votre bras?
- Pouvez-vous concevoir un circuit de papier composé de DEL et de ruban de cuivre pour éclairer votre bras en carton?
- Pouvez-vous ajouter un petit servomoteur avec un microcontrôleur micro:bit et le programmer pour faire bouger votre bras en carton?
Liens avec le programme pédagogique
- Raisonnement technique, processus de conception technique
- Pensée critique, résolution de problèmes, communication et collaboration
- Sciences :
- Mécanismes simples
- Espace
- Forces
- Santé :
- Dextérité, muscles et mouvements du corps
- Mathématiques :
- Mesures standard ou non standard
- Sens des nombres
- Introduction aux angles (pré-géométrie)
- Technologie :
- Robotique
Poursuivez l'exploration
- Date de modification :