
Mon effecteur de verrouillage du Canadarm3

Construisez un bras robotisé comptant plusieurs articulations et muni d'un effecteur de verrouillage pouvant saisir un objet.

Version textuelle de l'infographie Processus de conception en ingénierie
Processus de conception en ingénierie
- Problème ou défi
- Définis le problème
- Identifie les contraintes et défis de conception possibles
- Remue-méninges pour penser à plusieurs solutions au problème
- Sélectionne la solution la plus prometteuse
- Prototype la solution
- Teste et évalue ton prototype
- Revois ton prototype afin de l'améliorer
- Communique ta solution
Infographie intitulée « Processus de conception en ingénierie ». (Source : ASC.)
Définir
Nous, les humains, pouvons utiliser nos bras pour placer nos mains à un endroit précis et utiliser nos doigts pour saisir des objets. Le Canadarm3, lui, aura des effecteurs de verrouillage au lieu de mains et de doigts qui lui permettront de prendre différents objets et de les manipuler.
Le Canadarm3 servira à manipuler et à déplacer des objets et des matériaux à la station Gateway. Pour ce faire, il devra pouvoir se déplacer d'un endroit à l'autre de la station, notamment jusqu'à la baie de chargement, tout en agrippant diverses charges utiles. Il devra donc pouvoir bouger simultanément grâce à diverses articulations.
Identifier
La main est la partie du corps humain qui nous permet de tenir et de manipuler différents objets. Elle peut faire tout ça parce que les doigts peuvent se replier, et qu'on peut la faire se plier de diverses façons ou encore la faire pivoter. Comment concevoir l'effecteur de verrouillage d'un bras robotisé pour accomplir des tâches comme nous pourrions le faire avec les mains?
Matériel suggéré
- Papier, papier quadrillé ou papier isométrique pour dessiner votre conception.
- Crayons à mine ou de couleur.
- Divers bâtonnets de bois, crayons, pailles, ou branches ou brindilles droites.
- Carton, papier construction ou boite de céréales vide.
- Perles (facultatif; vous pouvez aussi fabriquer vos propres perles en papier).
- Attaches (élastiques, pince-feuilles, attaches parisiennes, cure-pipes, ficelle, ruban adhésif, colle).
- Ciseaux ou couteau utilitaire.
- Pailles (ou tubes faits de papier recyclé enroulé), au besoin.
- Pistolet à colle chaude (facultatif).
- Tous les matériaux de récupération que vous avez sous la main, p. ex. bouteilles en plastique, boites d'œufs, pailles (ou tubes faits de papier recyclé enroulé), bâtonnets de bois, brindilles, pierres.
- Peinture de diverses couleurs, papier de couleur, crayons de couleur, crayons à mine, marqueurs, papier d'aluminium ou tout autre matériel disponible pour donner fière allure à votre conception!
- Objets de taille, de forme et de poids différents que vous pourrez tenter de soulever et de déplacer à l'aide de votre bras robotisé et de son effecteur de verrouillage.
- Blocs Lego, blocs K'NEX, blocs KEVA (facultatif).

Version textuelle de l'infographie de quelques techniques de découpage et pliage de carton
Quelques techniques de découpage et pliage de carton
- Collerette
- Renfort en L
- Languettes
- Fente + fente
- Fente + languette
- Ficelle
Quelques techniques de découpage et de pliage de carton. (Source : ASC.)
Faire un prototype
- Tracez votre main sur un morceau de carton (ou une boite de céréales vide) et découpez-la.
- Pliez les doigts de la main en carton aux endroits des articulations de vos doigts (vous pouvez faire deux ou trois articulations par doigt, au choix).
- Fabriquez des tubes de papier ou trouvez un objet tubulaire comme une paille, et découpez-en des morceaux qui pourront être placés sur les trois segments de vos doigts en carton. Collez-les sur le carton avec de la colle ou du ruban adhésif.
- Faites passer un morceau de ficelle dans les tubes de chaque doigt. Nouez-en les extrémités ou collez-les à la main pour que les ficelles ne tombent pas. Les perles sont aussi une excellente option, si vous en avez.
- Quand vous tirez sur les ficelles, les doigts doivent maintenant tous pouvoir se replier comme ceux d'une main humaine.
- Placez divers objets dans la paume de la main et vérifiez si la main est capable de tenir ou d'agripper l'objet.
Note : Une extrémité du Canadarm3 doit être solidement fixée à un objet stationnaire (le dessus d'un bureau ou d'une table). Au moins deux des parties du bras doivent pouvoir se plier (comme un coude). La main devrait être capable de tenir un objet pendant que les parties du bras bougent.
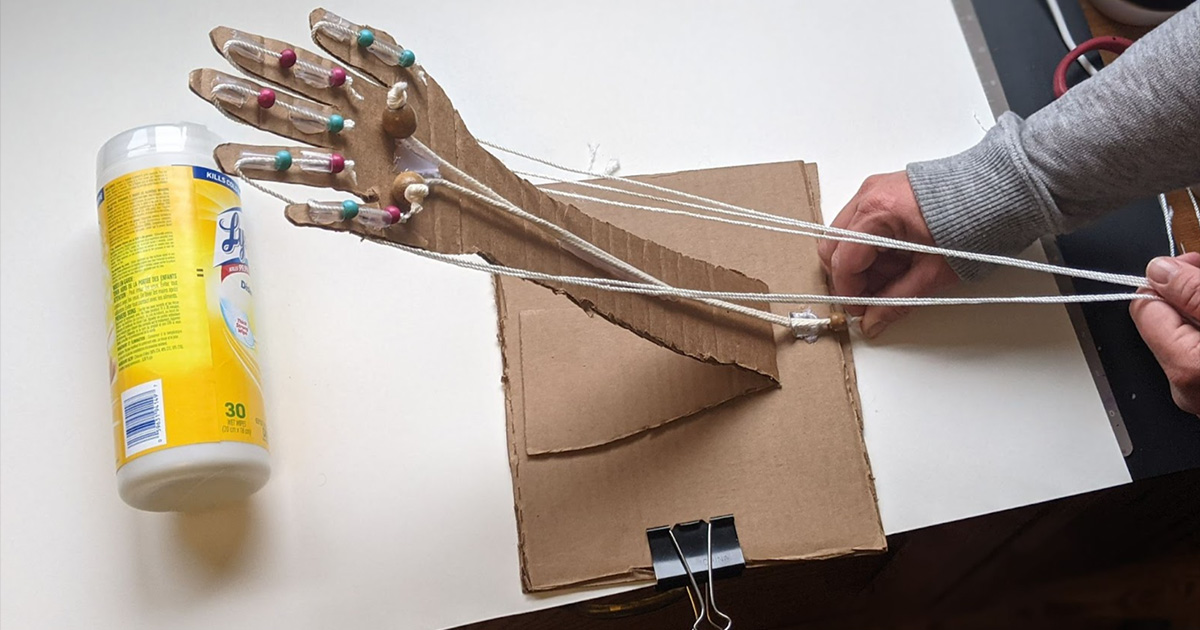
Une extrémité du Canadarm3 doit être solidement fixée à un objet stationnaire (le dessus d'un bureau ou d'une table). (Source : ASC.)

Placez divers objets dans la paume de la main et vérifiez si la main est capable de les tenir. (Source : ASC.)
Tester
- Votre bras a-t-il au moins deux degrés de liberté?
- Votre effecteur de verrouillage permet-il d'agripper un objet?
- Avez-vous été en mesure de créer un système qui permet de bouger les différentes parties du bras et l'effecteur de verrouillage?
- Avez-vous pu déplacer des objets?
Revoir
- Comment pourriez-vous améliorer votre conception? Y a-t-il des éléments que vous pouvez ajouter ou enlever pour la rendre plus efficace?
- Devez-vous changer quelque chose pour augmenter l'amplitude des mouvements ou renforcer la poigne?
- Comment pourriez-vous la construire avec moins de matériaux ou des matériaux différents?
- Quelles modifications apporteriez-vous à la structure pour améliorer le fonctionnement et les capacités de votre effecteur de verrouillage et de votre Canadarm3 dans l'ensemble?
Communiquer
- Quelles sont les principales caractéristiques de votre bras robotisé et de votre effecteur de verrouillage? Est-ce que vous êtes fier d'un aspect en particulier?
- Montrez-nous votre projet ou demandez à un adulte de publier une photo dans les médias sociaux et de mentionner l'ASC. On ne sait jamais, un véritable astronaute pourrait voir votre création!
Approfondir
- Pouvez-vous ajouter ou enlever des éléments à votre bras ou à votre effecteur de verrouillage pour améliorer leur efficacité?
- Essayez d'utiliser des circuits de papier pour ajouter des lumières à votre bras et à votre effecteur de verrouillage.
- Utilisez des servomoteurs et un microcontrôleur pour actionner votre bras et votre effecteur de verrouillage.
- Concevez des composants dans votre logiciel de modélisation 3D préféré et imprimez en 3D des pièces personnalisées.
- Utilisez des servomoteurs, des capteurs et un microcontrôleur pour automatiser votre bras et votre effecteur de verrouillage.
- Intégrez de la programmation avec Scratch ou Makey Makey pour rendre interactifs votre bras et votre effecteur de verrouillage.
- Intégrez des mécanismes pour commander votre bras et votre effecteur de verrouillage.
Liens avec le programme pédagogique
- Raisonnement technique, processus de conception technique
- Pensée critique, résolution de problèmes, communication et collaboration
- Sciences :
- Mécanismes simples
- Espace
- Santé :
- Dextérité, muscles et mouvements du corps
- Mathématiques :
- Mesures
- Technologie :
- Robotique
Poursuivez l'exploration
- Date de modification :