
My Canadarm3's end effector

Build an arm with an end effector with multiple joints that can grasp an object.

Text version of infographic entitled "The engineering design process"
The engineering design process
- Problem or challenge
- Define the problem
- Identify the constraints on your solution (e.g. time, money, materials) and criteria for success
- Brainstorm multiple solutions for the problem
- Select the most promising solution
- Prototype your solution
- Test and evaluate your prototype
- Iterate to improve your prototype
- Communicate your solution
Infographic entitled "The engineering design process". (Credit: Canadian Space Agency [CSA])
Define
As humans, we can use our arms to position our hands somewhere and use our fingers to grip items. Canadarm3 will have end effectors instead of hands and fingers to manipulate and grab different objects.
Canadarm3 will be responsible for manoeuvring and manipulating objects and materials on Gateway. To be capable of this, Canadarm3 will need to move from point to point on the station, including the storage bay, while manipulating various cargo and payloads. This will require Canadarm3 to be able to move various joints simultaneously.
Identify
Our hand is the part of our arm that makes it possible for humans to hold and manipulate different objects and tools. Its ability to bend in different ways is what makes this possible. How can the end effector of a robot arm be designed to perform similar tasks as we are able to do with our hands?
Suggested materials
- Paper, graph paper, or isometric paper to sketch your design
- Pencils, pencil crayons, crayons, or markers
- A choice of wood sticks, pencils, straws, or straight branches or twigs
- Cardboard, construction paper, or empty cereal box
- Beads (optional but you can also make your own paper beads)
- Fasteners (elastics, binder clips, brads, pipe cleaners, string, wool, tape, glue, or homemade glue)
- Scissors or cardboard cutters
- Hot glue gun (optional)
- Any repurposed materials you have on hand (plastic bottles, egg cartons, straws or rolled-up recycled paper to make a tube, Popsicle sticks, small twigs, rocks, etc.)
- Variety of paints, coloured paper, tinfoil, or any other materials available to make your design look awesome!
- Different sized, shaped and weighted objects that you can attempt to lift and move using your robotic arm and end effector
- Optional: Lego, K'NEX blocks, KEVA blocks

Text version of infographic showing a few cardboard cutting and folding techniques
A few cardboard cutting and folding techniques
- Flange
- L-brace
- Tabs
- Slot + cut
- Slot + tab
- String
A few cardboard cutting and folding techniques. (Credit: CSA)
Prototype
- Trace your hand onto a piece of cardboard (or empty cereal box) and cut out the hand.
- Fold the fingers on your cardboard hand in the same spots as the joints are in your fingers. (You can choose to use two or three finger joints.)
- Make tubes out of paper, or find a tubular object like a straw, and cut the pieces of straw that will fit onto the three different segments of your cardboard fingers. You can tape or glue them onto the cardboard.
- Run a piece of string through the straws on each finger. Make a knot at the end of each rope or tape it to the hand; that way it will not fall out. If you have beads, they are a great option also.
- When you pull on the ends of the strings, each of the fingers should now be able to bend and flex similar to a human hand.
- Place various objects in the palm of the hand and test to see if the hand is able to hold, or grip, the object.
Note: One end of Canadarm3 must be securely anchored to a stationary object (top of a desk or table). The two or more parts of the arm should be able to pivot (like an elbow). The hand should be able to hold onto an object while the parts of the arm are being moved.
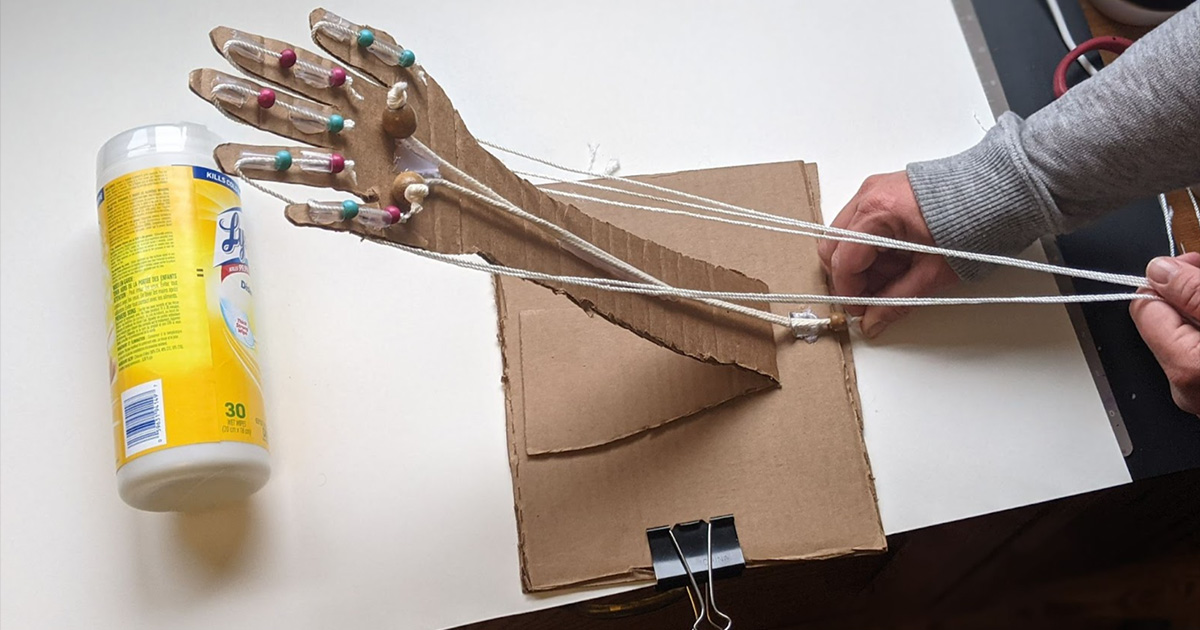
One end of Canadarm3 must be securely anchored to a stationary object (top of a desk or table). (Credit: CSA)

Place various objects in the palm of the hand and test to see if the hand is able to hold, or grip, the object. (Credit: CSA)
Test
- Does your arm provide you with at least two degrees of freedom?
- Does your end effector allow you to grab, or grip, an object or tool?
- Were you able to create a system that was able to move the different parts of the arm and hand end effector?
- Were you able to move objects from their initial position to other locations?
Iterate
- How would you improve your design? Are there parts you can add or remove to make it more effective?
- Do you need to change anything to add more range of motion or grip the item more securely?
- How could you build it with fewer materials or different materials?
- What variations, adaptations or structural changes would you make to improve the overall function and ability of the robotic arm and end effector?
Communicate
- What are the highlights of your robotic arm and end effector? Is there something about it you are really excited about?
- Share your project with us or ask an adult to share a picture on social media and tag the CSA. You never know: a real astronaut might see your creation.
Taking it further
- Can you add or remove parts to your arm or end effector to increase its effectiveness?
- Try using paper circuits to add lights to your arm and end effector.
- Use servo motors and a microcontroller to actuate your arm and end effector.
- Design components in your favourite 3D modelling software and 3D print custom parts.
- Use servos, sensors, and a microcontroller to automate your arm and end effector.
- Integrate Scratch coding or a Makey Makey to make your arm and end effector interactive.
- Integrate mechanisms to control your arm and end effector.
Curriculum links
- Design thinking and the engineering design process
- Critical thinking, problem solving, communication, and collaboration
- Science:
- Simple mechanisms
- Space
- Health:
- Dexterity, muscles and body movements
- Math:
- Measurement
- Technology:
- Robotics