
ExoMars : voyage dans le passé lointain de Mars

Le Trace Gas Orbiter d'ExoMars
- Lancement :
- Arrivée :
- État de la mission : en cours
L'astromobile Rosalind-Franklin
- Lancement :
Le programme ExoMars (en anglais seulement) de l'ESA est une mission d'exploration de Mars réalisée en deux parties.
- En , le Trace Gas Orbiter (TGO) d'ExoMars s'est mis en orbite autour de Mars pour en étudier l'atmosphère et la surface. L'atterrisseur Schiaparelli a ensuite été envoyé vers la surface.
- L'astromobile Rosalind-Franklin (en anglais seulement) sera équipé notamment d'une foreuse et d'instruments destinés à la recherche en biologie et en chimie.
Objectifs
Le principal objectif scientifique du programme ExoMars est d'établir s'il y a déjà eu de la vie sur Mars. Les deux missions d'ExoMars visent aussi à démontrer des capacités essentielles en vue de futures missions sur la planète rouge :
- techniques de rentrée atmosphérique, de descente et d'atterrissage;
- capacité de l'astromobile de se déplacer sur plusieurs kilomètres;
- accès à une couche du sol martien sous la surface;
- prélèvement et analyse d'échantillons.
C'est connu, atterrir sur Mars est très difficile. À preuve, environ la moitié seulement des tentatives d'atterrissage sur Mars ont été réussies. En , l'atterrisseur Schiaparelli s'est écrasé au sol. L'examen des données sur l'anomalie a permis de tirer des leçons qui seront prises en compte dans les futures missions.
À cause de la faible densité de l'atmosphère de Mars, la séquence de rentrée atmosphérique, de descente et d'atterrissage est rapide et doit être très précise. Quand le module de descente d'ExoMars pénétrera l'atmosphère de Mars, il filera à la vitesse d'environ 20 000 km/h. Son bouclier thermique et son parachute le ralentiront. Des rétrofusées s'allumeront pour faire atterrir l'astromobile en douceur.

L'astromobile Rosalind-Franklin atterrira dans la région d'Oxia Planum de Mars, dont on voit une partie dans cette image captée par la sonde Mars Reconnaissance Orbiter. Cette zone argileuse a été choisie principalement en raison de sa valeur scientifique. D'après les chercheurs, l'activité volcanique a recouvert d'anciens sédiments aquatiques, ce qui a peut-être préservé des indices de vie antérieure. (Source : NASA/JPL/Université de l'Arizona.)
Rôle du Canada dans la mission
Grâce à l'accord de coopération conclu entre le Canada et l'ESA, des entreprises canadiennes ont pu soumissionner pour des contrats dans le cadre des missions ExoMars.
- Le TGO est doté d'un sous-système d'antenne de communication construit par l'entreprise canadienne MDA Space.
- Le châssis et les composants électroniques de l'astromobile Rosalind-Franklin seront fabriqués par MDA Space. Les caméras de navigation seront produites par Neptec Design Group, une autre entreprise canadienne (acquise par MDA Space).
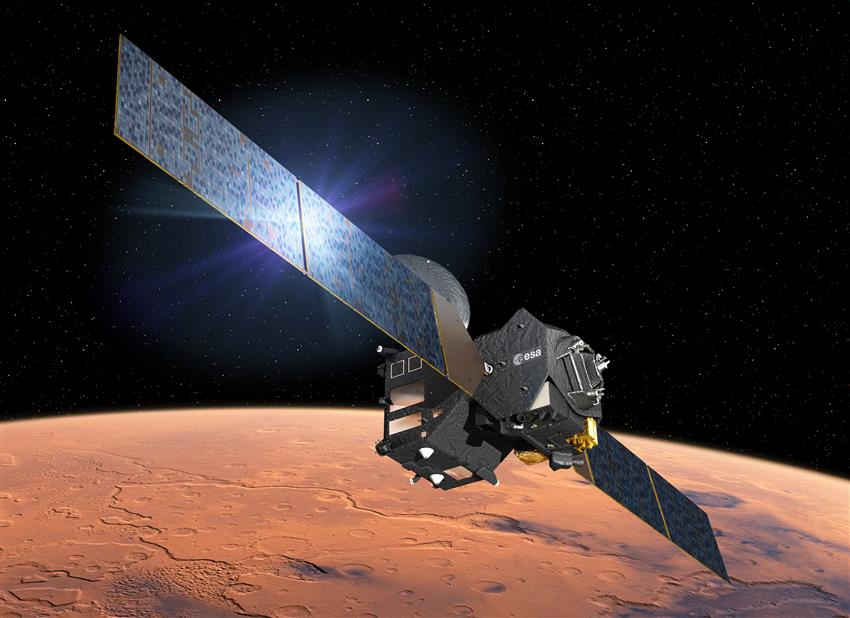
Le TGO d'ExoMars cherche des traces de méthane et d'autres gaz qui pourraient être le signe de processus biologiques ou géologiques actifs sur Mars. Le TGO servira aussi de relai de communication pour l'astromobile Rosalind-Franklin et la plateforme d'atterrissage de recherche scientifique. (Source : ESA/D. Ducros.)
L'Agence spatiale canadienne finance les travaux d'un scientifique canadien qui participe à la mission du TGO d'ExoMars .
- Le Pr Livio Tornabene (Université Western) est cochercheur de l'équipe scientifique responsable de l'imageur CaSSIS (Colour and Stereo Surface Imaging System) embarqué sur le TGO. Lui et son équipe concentrent leurs recherches scientifiques sur les cratères d'impact et la composition du sol. Ils utilisent les données de l'orbiteur pour étudier les conditions géologiques sur Mars. Ils continuent à affiner le réglage de l'imageur CaSSIS, à développer des produits de données et à participer aux activités courantes de la mission.
L'Agence finance aussi la participation d'une scientifique canadienne à la mission de l'astromobile Rosalind-Franklin.
- La Pre Christy Caudill (Université Western) est cochercheuse de l'équipe scientifique chargée de l'instrument PanCam. Elle met au point de nouvelles techniques qui permettent d'identifier des types précis de minéraux en établissant un lien entre les données acquises en orbite et les images prises par l'astromobile.
Aussi cochercheur de l'équipe scientifique chargée de l'instrument PanCam, le Pr Gordon Osinski (Université Western) a reçu antérieurement une subvention de l'Agence pour ses travaux faisant appel aux futures images panoramiques de Rosalind-Franklin pour étudier des zones de Mars où se trouvent des cratères météoritiques.
Ensemble, les missions ExoMars permettront aux scientifiques de mieux comprendre l'atmosphère martienne. Par ailleurs, elles fourniront des indices pour déterminer s'il y a déjà eu de la vie sur Mars et aideront à tester des technologies en vue d'une future mission de retour d'échantillons martiens.
Poursuivez l'exploration
- Date de modification :