
Attrapé cosmique avec le Canadarm2
Description
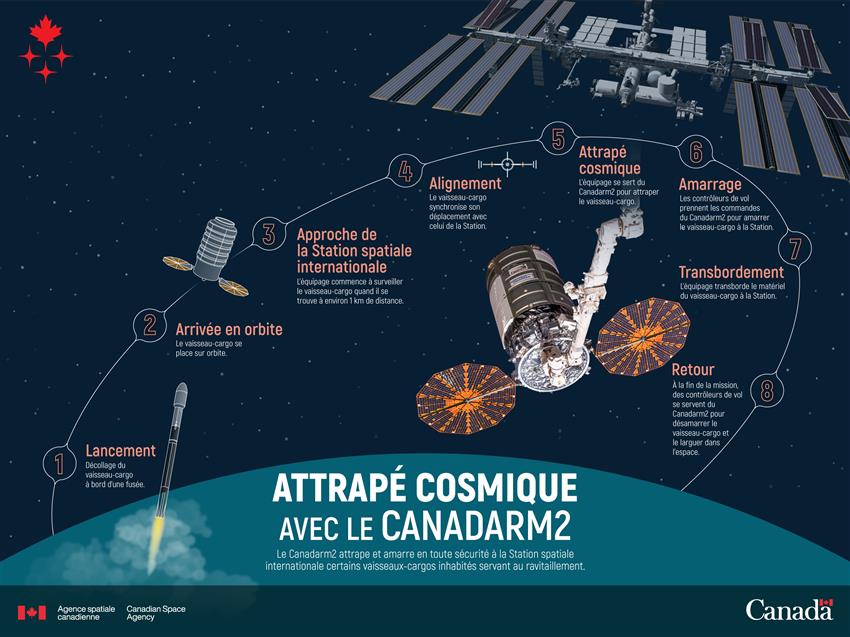
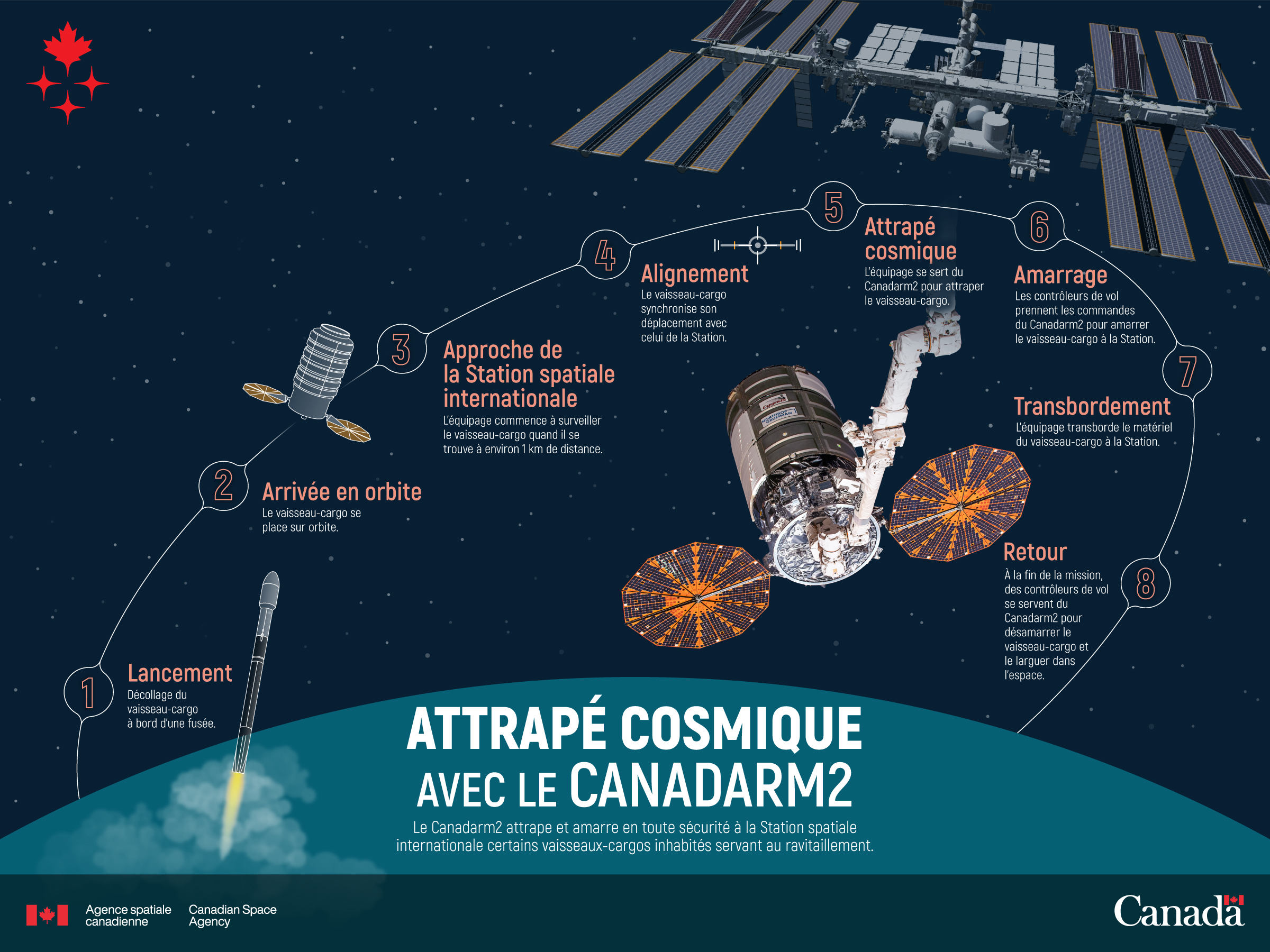
Depuis 2001, le Canadarm2 sert à assurer la maintenance régulière de la Station spatiale internationale. En 2009, la polyvalence de ce robot spatial a été démontrée : on a commencé à l'utiliser pour attraper certains vaisseaux-cargos inhabités et les amarrer à la Station. Cette manœuvre précise et extrêmement complexe s'est révélée essentielle lors de nombreuses missions de ravitaillement.
Cette infographie présente les étapes de cette opération robotisée du nom d'« attrapé cosmique ». (Source : Agence spatiale canadienne.)
Version textuelle
1 – Lancement : Décollage du vaisseau-cargo à bord d'une fusée.
2 – Arrivée en orbite : Le vaisseau-cargo se place sur orbite.
3 – Approche de la Station spatiale internationale : L'équipage commence à surveiller le vaisseau-cargo quand il se trouve à environ 1 km de distance.
4 – Alignement : Le vaisseau-cargo synchronise son déplacement avec celui de la Station.
5 – Attrapé cosmique : L'équipage se sert du Canadarm2 pour attraper le vaisseau-cargo.
6 – Amarrage : Les contrôleurs de vol au sol prennent les commandes du Canadarm2 pour amarrer le vaisseau-cargo à la Station.
7 – Transbordement : L'équipage transborde le matériel du vaisseau-cargo à la Station.
8 – Retour : À la fin de la mission, des contrôleurs de vol au sol se servent du Canadarm2 pour désamarrer le vaisseau-cargo et le larguer dans l'espace.
{kind=link}
Taille : 1,53 Mo
Dimensions : 2400 x 1800 pixels
Résolution : 96 ppp
Date de l'image : 2 août 2024
Lien(s) utile(s)
Droits d'auteur / Autorisation de reproduire
- Date de modification :