
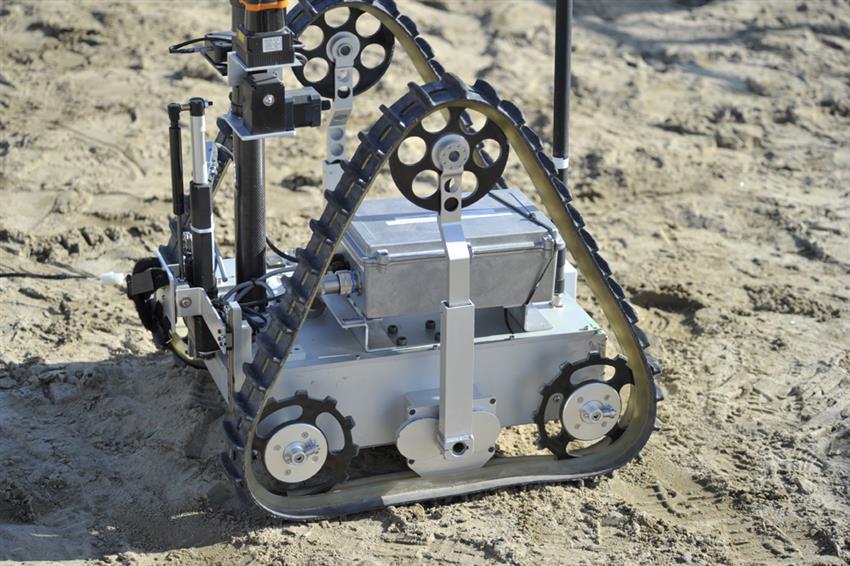
MRPTA - Plateforme de microrover avec bras robotique instrumentalisé

Deuxième microrover mis au point par l'Agence spatiale canadienne, ce petit véhicule est doté d'un bras utilitaire. Il peut être exploité à des fins scientifiques ou en appui à un astronaute ou à un autre rover plus imposant.
Éléments techniques
| Destination | La Lune ou Mars |
|---|---|
| Dimensions (longueur, largeur et hauteur) | 0,61 m x 0,51 m x 0,61 m |
| Masse | 30 kg |
| Vitesse | 0,07 km/h |
| Alimentation | Électricité (batteries rechargeables) |
Particularités
- Ce microrover a pour particularité qu'il peut rouler en terrain accidenté au moyen d'un système à roues ou à chenillettes. Il peut également relever ou abaisser son centre de gravité afin d'accroître sa stabilité.
- À l'instar de Kapvik, il peut être utilisé pour explorer des espaces restreints inaccessibles aux humains ou aux rovers plus volumineux.
- Ce rover peut être commandé à distance par un humain et il peut aussi naviguer en autonomie ou en collaboration avec un rover de plus grande dimension.
Constructeur
Engineering Services Inc. (ESI).
Partenaires
Cohort Systems Inc (anciennement Frontline Robotics), Université York
- MRPTA - Plateforme de microrover avec bras robotique instrumentalisé - photo 1
- MRPTA - Plateforme de microrover avec bras robotique instrumentalisé - photo 2
- MRPTA - Plateforme de microrover avec bras robotique instrumentalisé - photo 3
- MRPTA - Plateforme de microrover avec bras robotique instrumentalisé - photo 4
- MRPTA - Plateforme de microrover avec bras robotique instrumentalisé - photo 5




Poursuivez l'exploration
- Date de modification :