
Qu'est-ce que le Canadarm?

Le Canadarm est la plus célèbre réalisation technologique du Canada dans le domaine de la robotique. Ce bras robotisé a servi aux missions des navettes spatiales américaines pendant 30 ans (-).
Voici les étapes marquantes de cette légende.
Naissance du projet
Construire un outil aussi agile que le bras humain et capable de fonctionner parfaitement dans l'espace : tout un défi!
Le Canadarm a été conçu en réponse à un besoin de la NASA au début des années . La NASA développait alors un nouveau système de transport spatial : la navette spatiale.
Le bras manipulateur requis devait être capable de décharger le contenu de la soute de la navette spatiale.
Plusieurs sociétés canadiennes ont participé au projet : DSMA Atcon, Spar, CAE Electronic et RCA.
Construction
Le Canada a dû respecter les exigences rigoureuses de la NASA en matière de :
- poids
- dextérité
- fonctionnement manuel et automatique
- polyvalence
- précision
- sécurité
- fiabilité
Les matériaux ont été soigneusement choisis pour résister aux conditions extrêmes propres au milieu spatial : titane, acier inoxydable et graphite époxyde.
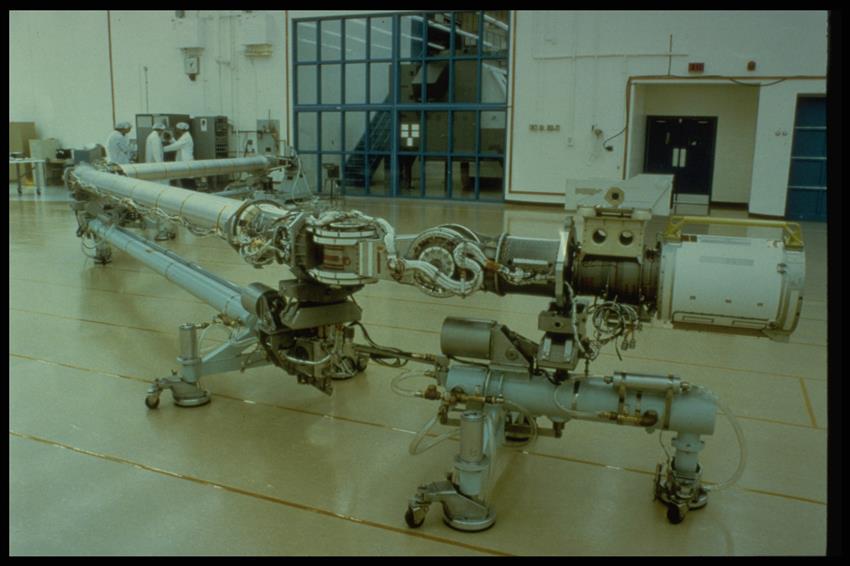
Le Canadarm, sans sa couverture de protection thermique blanche, repose sur le plancher du hall d'intégration de Spar Aérospatiale à Weston, en Ontario. (Source : Agence spatiale canadienne.)
Un revêtement isolant blanc muni d'éléments chauffants a été ajouté pour maintenir le Canadarm à une température convenable. Le bras robotisé devait effectivement être protégé contre la chaleur intense du Soleil et contre le froid extrême la nuit.
Mise à l'essai
L'imposant bras robotisé était conçu pour une utilisation en impesanteur, c'est-à-dire en absence de pesanteur. D'ailleurs, il n'était même pas possible de le manœuvrer sur Terre à cause de la gravité.
Les concepteurs ont donc dû construire une salle d'essai permettant de faire bouger les articulations du bras.
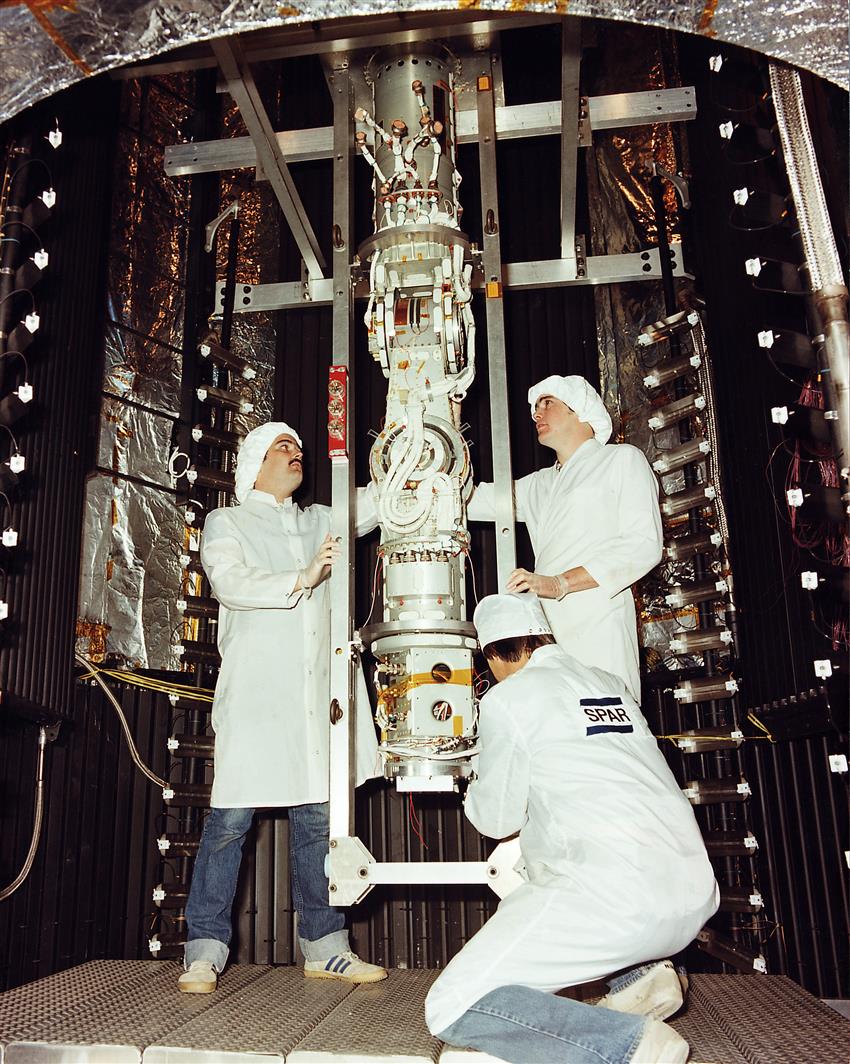
Le bras robotisé Canadarm au cours d'essais. (Source : Centre de recherches sur les communications Canada [CRC].)
Une installation de simulation informatisée a aussi été mise au point pour permettre d'évaluer la manœuvrabilité du bras et de former les astronautes en vue de son utilisation en orbite.
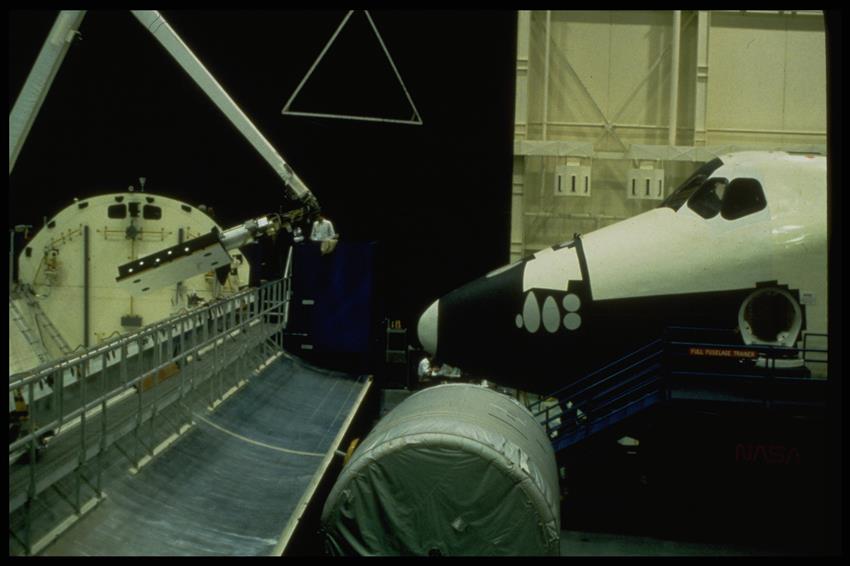
Simulateur servant à la formation pour l'exploitation du Canadarm au centre spatial Johnson. (Source : NASA.)
Fonctionnement
Le bras robotisé était doté de plusieurs articulations pivotantes à l'épaule, au coude et au poignet.
Sa main (effecteur de verrouillage) s'enroulait autour d'une prise en métal installée sur les objets à attraper.
Le Canadarm pouvait soulever des charges de plus de 30 000 kg (jusqu'à 266 000 kg en microgravité) tout en consommant moins d'électricité qu'une cafetière!
Les caméras au poignet et au coude fournissaient des images utilisées pour inspecter la navette spatiale et son chargement.
Le bras robotisé pouvait être manœuvré depuis le poste de commande ou être programmé de façon à fonctionner automatiquement.

Une articulation du Canadarm. (Source : MacDonald, Dettwiler and Associates Ltd.)
Lancement
Le gouvernement du Canada a remis le premier modèle du Canadarm à la NASA en tant que contribution au projet de navette spatiale. C'est cette contribution qui a permis d'envoyer le premier astronaute canadien Marc Garneau dans l'espace.
Le Canadarm s'est déplié pour la première fois dans l'espace le .
Les membres de l'équipage de la mission STS-2 (en anglais seulement) ont déployé le gigantesque bras robotisé à partir de la soute de la navette spatiale Columbia et, au grand soulagement de tous, il a fonctionné comme prévu.

Le Canadarm est déployé pour la première fois dans l'espace dans le cadre de la mission STS-2, en . (Source : NASA.)
Utilisation
Après la mise en service du premier Canadarm, la NASA a commandé quatre autres bras robotisés. L'équipe de l'industrie responsable de ces projets portait désormais le nom de MacDonald, Dettwiler and Associates Ltd.
Au cours de ses 30 ans de service, le Canadarm de la navette spatiale a accompli de nombreuses tâches. Il a servi entre autres à :
- mettre des satellites en orbite;
- saisir des satellites pour leur réparation;
- assembler la Station spatiale internationale (SSI);
- appuyer les astronautes lors des sorties dans l'espace;
- filmer l'expérience des astronautes dans l'espace avec deux caméras IMAX;
- examiner le bouclier thermique de la navette à l'aide de la perche d'inspection.

L'astronaute de l'Agence spatiale canadienne Chris Hadfield aux commandes du Canadarm dans le cadre de la mission STS-74. (Source : NASA.)

Un astronaute, pieds calés à l'extrémité du Canadarm, est transporté jusqu'au télescope Hubble afin d'y installer des éléments protecteurs. (Source : MacDonald, Dettwiler and Associates Ltd.)

Le Canadarm de la navette spatiale Discovery et la perche d'inspection, avec la Terre en toile de fond. (Source : NASA.)
Mise hors service et héritage
En , le programme de la navette spatiale prenait fin.
Le Canadarm a effectué son 90e vol sur la navette Atlantis, dans le cadre de la mission STS-135.
C'est ainsi que se sont terminés les 30 ans d'exploitation réussie du célèbre bras robotisé.
Le Canadarm a pris sa retraite, mais son histoire ne s'arrête pas là.
Retombées sur Terre et dans l'espace
La technologie développée pour le Canadarm continue de produire des résultats.
- Conception des robots canadiens à la SSI.
- Retombées directes sur Terre : technologies dérivées dans le domaine de la santé qui améliorent notre qualité de vie.
- Participation à la prochaine étape de l'exploration spatiale : le Canada équipera la station Gateway du Canadarm3, un système robotisé intelligent doté de logiciels de pointe pour pouvoir fonctionner en toute autonomie, sans intervention humaine.
Poursuivez l'exploration
- Date de modification :