
Fueling up in Space: The Robotic Refueling Mission (RRM)
The Robotic Refueling Mission
The Canadian Space Agency (CSA) collaborated with NASA on the Robotic Refueling Mission (RRM), an experiment on the exterior of the International Space Station (ISS). RRM was designed to use Dextre, the Station's Canadian-built robotic handyman, to test the technologies, tools and techniques that could be used to service and refuel satellites in orbit.The mission marked the first time that Dextre was used for a research and development project, and illustrated how the space station is being used as a technology test-bed.
Latest Highlights
Since the first RRM operations in , Dextre has performed other series of tests to show how a robot could be used to refuel and service in orbit, a key ability that could help make space exploration more sustainable by extending the useful lifetimes of satellites and spacecrafts.
Dextre, gas attendant: The Robotic Refueling Mission
In this video, Mathieu Caron from the CSA explains the phase of RRM in which Dextre simulated refueling a mock satellite with liquid ethanol. (Credit: CSA)
Dextre's first R&D experiment to test how robots could refuel satellites
For RRM, NASA's Goddard Space Flight Center designed a module and tool kit for Dextre. Launched on board the final flight of the space shuttle in 2011, the cube-shaped module is roughly the size of a washing machine (about 250 kg), and has 28 different pieces and parts found on a typical satellite: caps (similar to the gas cap on a car), nozzles, valves, and wires. The RRM module also has four new tools for Dextre housed inside: a Blanket Manipulation Tool, a Wire Cutter, Multifunction Tool, Safety Cap Removal Tool and Nozzle Tool. The tools (each about the size of a toaster) allow Dextre to complete tasks like cutting through the simulated satellite's lock wires and blanket tape, and to remove layers of insulation.
For RRM, the NASA and the CSA assembled an international project team with a vast and varied expertise. Tests to prepare for on-orbit RRM operations were conducted at Goddard and at MDA Space in Brampton, Ontario (formerly MacDonald, Dettwiler and Associates Ltd. (MDA) and SPAR Aerospace, the prime contractor for the Canadarm as well as the CSA's Mobile Servicing System on board the station). RRM operations on board the space station were choreographed and coordinated by international ground crews at NASA's Goddard Space Flight Center in Greenbelt, Maryland; Johnson Space Center in Houston, Texas; Marshall Space Flight Center in Huntsville, Alabama; and the CSA's mission control center in Longueuil, Quebec.
The CSA is now looking ahead to advance state-of-the-of-art space robotics with Canadarm3, Canada's contribution to Gateway, a lunar outpost that will enable sustainable human exploration of the Moon.
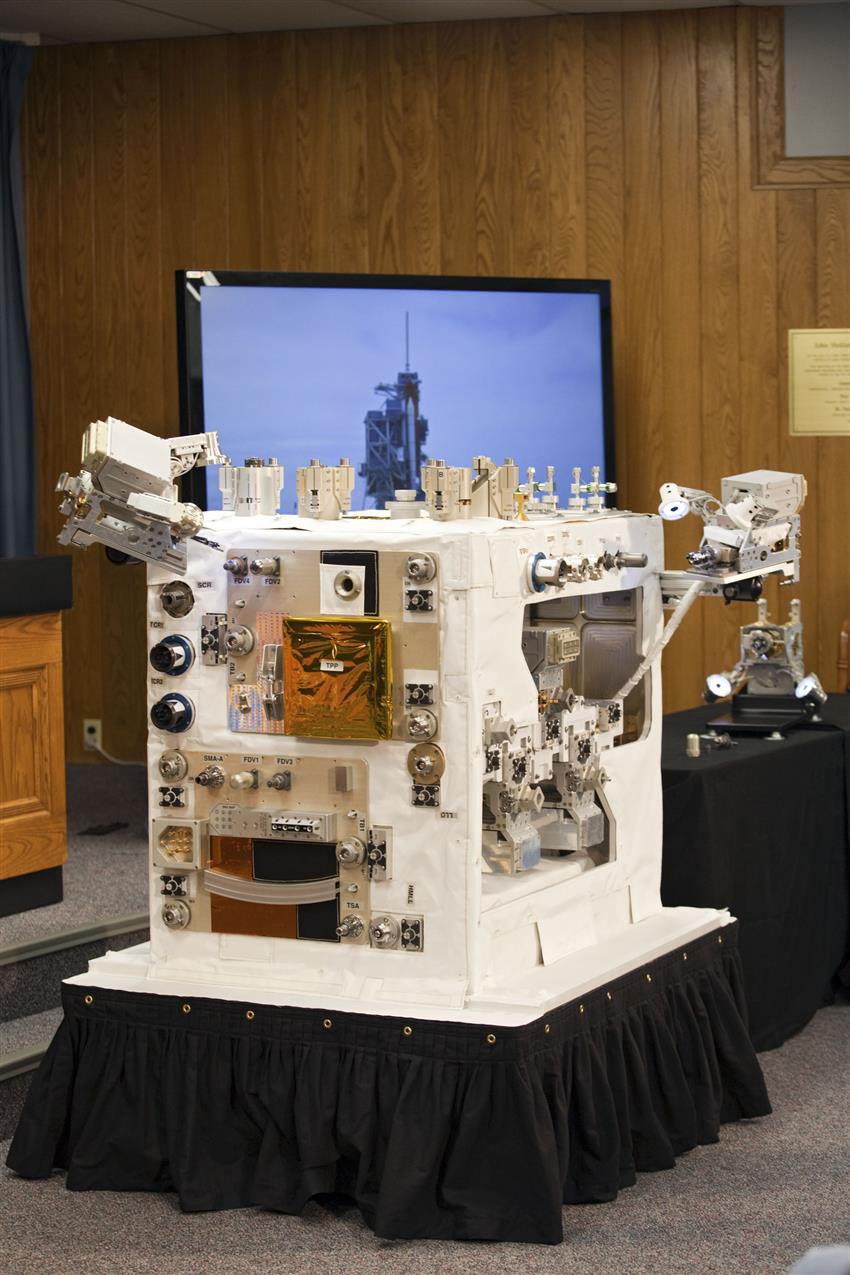
The RRM tool box and customized task box are the size of a washing machine (mock-up shown here). The RRM hardware was launched into space on board flight STS-135, the last flight of the Space Shuttle. (Credit: NASA)
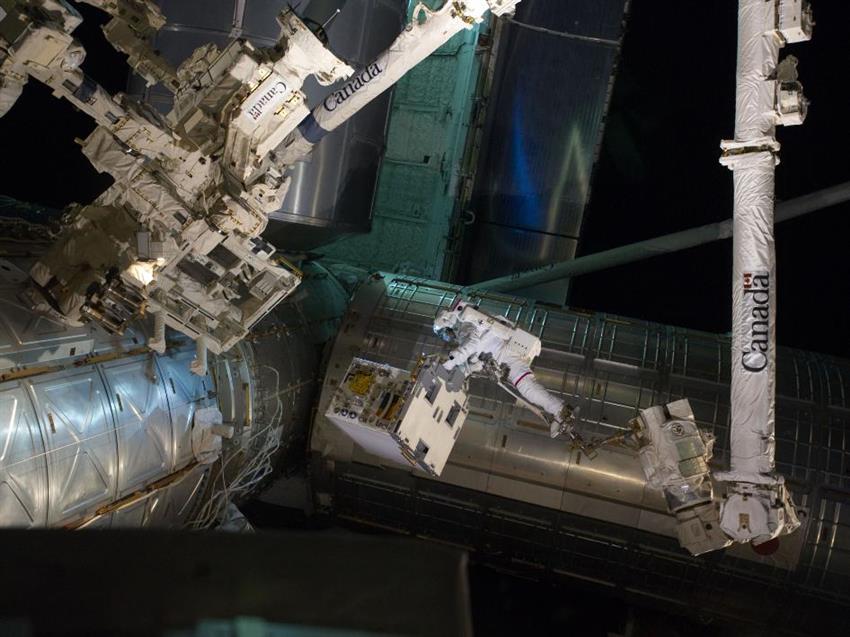
NASA astronaut, Mike Fossum, holds the hardware box for the RRM while Canadarm2 moves him towards Dextre's workbench. Once Mission STS-135 is complete, Canadarm2 and Dextre will install the RRM equipment on the EXPRESS Logistics Carrier 4 on the ISS. (Credit: NASA)

The hardware box for the RRM is being installed on Dextre's workbench (middle). The NASA astronaut wearing the space suit with the red stripes, Mike Fossum (left), is attached to Canadarm2, the ISS robotic arm. Ron Garan, in the white space suit (right), is moving closer to Fossum to help him secure the RRM equipment on one of Dextre's arms. (Credit: NASA)

Dextre received the tools and task box which will be used for its first research and development project, the RRM. (Credit: NASA)
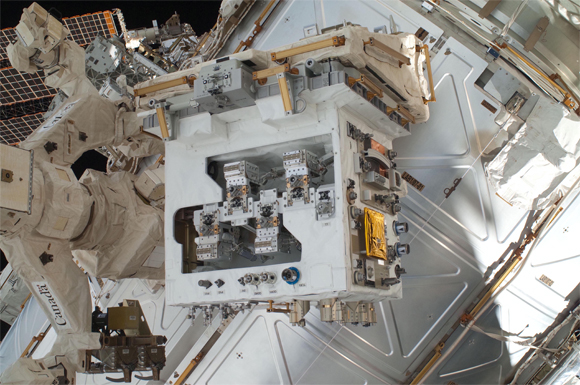
Dextre (left) with the RRM module (centre). (Credit: NASA)

Perched on the end of Canadarm2, Dextre installs the RRM hardware on the ISS (the ExPRESS Logistics Carrier-4) on September 2, 2011. (Credit: NASA)

A close-up view taken by a low-resolution engineering camera of the black wire cutting tool used by Dextre (not visible) as it cuts the ambient cap wire on the RRM module in March 2012. This task was one of the mission's trickiest operations, with only about a millimetre of clearance. (Credit: NASA/CSA)

A close-up of the multi-function tool (left) held by Dextre (not visible) approaching the RRM activity board in March 2012. (Credit: NASA/CSA)

While riding on the end of Canadarm2, Dextre approaches the RRM module (on bottom platform, left side) to perform the Launch Lock Task. (Credit: NASA)