
Mars sample-return simulation

In , the Canadian Space Agency (CSA) led a Mars sample-return simulation in the Utah desert with multiple collaborators from academia, industry, and international space agencies.
Why Utah?
Utah was selected based on geological features at the simulation site that are very similar to those found on Mars. The area contains an ancient streambed; although there is no water there now, the rocks hold clues that there used to be a river flowing there in the past, much like features that are observed on Mars. On Earth, ancient streambeds can preserve signs of ancient life. The analogue mission allowed scientists to better understand how to explore this kind of feature with a rover, and test possible approaches that may make exploration more efficient.
Sample selection and collection
Objective: Learn how to identify the best samples
Date: Du to
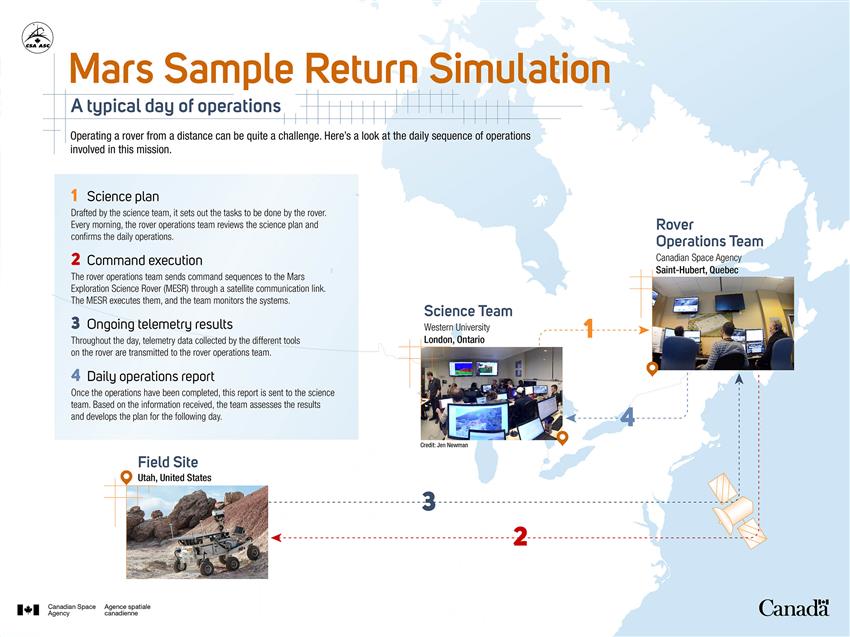
Working in collaboration with the CSA, a science team based at the science operations centre at Western University in London, Ontario, developed science plans for the CSA's Mars Exploration Science Rover (MESR). They identified and characterized rocks that allowed them to better understand the environmental history of the area and the potential to preserve signs of ancient life, and selected samples ("cores") using a drilling tool.

As would be the case in a real Mars mission, the science team had to respect the rover's power capacity and its data collection and transfer limits, as well as a restricted telecommunication window. They also juggled competing science priorities, regrouped to troubleshoot issues, and experienced the excitement of success when they collected their first samples.
At the end of each day, they uploaded their science plan for the following day to the CSA's rover operations team, based at CSA headquarters in Longueuil, Quebec. The rover operations team's role was to make sure that this plan could be followed. On the next day, once everything had been verified, the CSA sent commands to the rover through a satellite communication relay.
This type of simulation is a great way to train our country's next generation of planetary space explorers in one of the most realistic "planetary exploration" settings accessible on Earth.
Sample retrieval and transfer
Objective: Demonstrate new technologies for handling samples while increasing expertise
Date : to
During this phase of the mission, the CSA tested and demonstrated new technologies. For instance, they used the rover's manipulator arm with a grapple system to capture the sample tubes collected in the initial phase of the mission. They then stored them in containers on the rover. The rover later returned the samples to a mock rocket, or Mars Ascent Vehicle (MAV), for delivery. This phase of the simulation ended when the samples were placed on the MAV. In a real Mars mission, the rocket would then have sent these samples into orbit to be captured by another spacecraft for their safe return to Earth.

Participating in these types of tests continues to build on existing partnerships with international space agencies, and positions Canada to be a key partner in future planetary exploration missions.
Scientific validation of samples
Objective: Validate that the "best" samples were collected
Date : to
While the rover was performing the sample retrieval and transfer phase, a team of field experts (including members of the science team and collaborators from NASA's Jet Propulsion Laboratory, University of Nevada at Las Vegas, the UK Space Agency, Canadian scientists, and the CSA) was on site in Utah. They collected samples that they believed had the best chance of containing signs of life, and compared their samples to the ones collected by the rover. They conducted their analysis over the following year in order to determine how effective their rover sample selection strategy was, which will allow them to eventually refine future Mars sample-return mission concepts.
Collaborators
- The science team (London, Ontario)
- 32 undergraduate students, graduate students and post-doctoral fellows: Western University, University of Winnipeg, York University, McGill University, University of British Columbia
- 12 researchers/professors: Western University, McGill University, University of Winnipeg, Canadensys, NASA/JPL, Stony Brook University, and the Open University (UK)
- Led by Dr. Gordon (Oz) Osinski from Western University
- Role: Interpreted data, planned daily operations for the simulation
- The field team (Utah, United States)
- CSA employees, academics, and industry members specialized in robotics, telecommunications, field geology and science instrument operations
- Role: Established and maintained communication links with the two other teams, troubleshot, and ensured safe operations of the rover
- The rover operations team (Longueuil, Quebec)
- CSA employees and industry members specialized in robotics engineering
- Role: Validated the science plan developed by the science team, prepared command sequences, executed commands and monitored the systems
- NASA headquarters / Jet Propulsion Laboratory (JPL)
- Role: Provided expertise from Mars mission development and operations, participated in scientific investigations and operations, and shared insights with the CSA on the sample-return technology developed and challenges encountered in preparing for a future mission
- The UK Space Agency
- Role: Performed parallel and joint scientific investigations with the international team, while testing and validating instruments for the ExoMars Rosalind Franklin rover mission
- DLR (German Aerospace Center)
- Role: Tested parallel rover sample collection and return techniques
Past missions and funding
Since , the CSA and Western University have collaborated on multiple analogue missions, funded by a Collaborative Research and Training Experience (CREATE) grant from the Natural Sciences and Engineering Research Council of Canada (NSERC). The initiative was led by Western University. This sample-return analogue mission marked the final year of the collaboration.
Both Western and McGill universities received grants to support the science operations involved in this analogue mission as part of the CSA Space Exploration Science Definition Studies announcement of opportunity.